
Servoazionamento AC
Introduzione al prodotto

1. Caratteristiche del driver del motore auv
1.1. Risposta rapida
Adattarsi immediatamente alle mutevoli condizioni di carico
Anello di funzione veloce ad alte prestazioni
Feedback sulle prestazioni in tempo reale
1.2. Stabile e compatibile
L'attività di elaborazione DSP è più affidabile e stabile
Pienamente compatibile con i principali motori rotanti e ad azionamento diretto di terze parti
1.3. Sicuro e affidabile
Riduci il rumore e i requisiti hardware aggiuntivi
Il monitoraggio di sovratensione, corrente e temperatura offre una maggiore affidabilità
2. Tabella parametri
Parametro | Servoazionamento AC | Personalizzato |
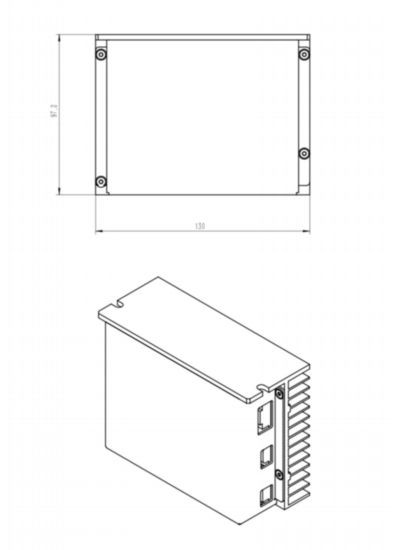
Taglia | 112,5 * 90 mm | Personalizzato |
Voltaggio | 18~60V | 18~60V |
Corrente di alimentazione del controller | 30A | 30A |
energia | 1500W | GG lt; 10Kw |
Sensore di supporto | Con hall, encoder incrementale (può supportare 4096 fili) | Nessuna hall, con hall, encoder incrementale (può supportare 4096 fili) |
Protezione dalle eccezioni | Rotore bloccato, sottotensione, sovracorrente | Rotore bloccato, sottotensione, sovracorrente |
Comunicazione del segnale | 485 | CAN / 485 |
I parametri di cui sopra sono solo di riferimento. La nostra tecnologia di prodotto è costantemente aggiornata e aggiornata. Allo stesso tempo, accettiamo anche la personalizzazione e lo sviluppo dei clienti.
3.Dettagli del prodotto


4. Fabbrica e qualificazione




5. Istruzioni e precauzioni
Il servoazionamento è un tipo di controller utilizzato per controllare il servomotore. La sua funzione è simile a quella del convertitore di frequenza che agisce su un comune motore AC. Appartiene a una parte del servosistema e viene utilizzato principalmente nel sistema di posizionamento ad alta precisione. Generalmente, il servomotore è controllato da posizione, velocità e coppia per ottenere un posizionamento ad alta precisione del sistema di trasmissione. Allo stato attuale, è un prodotto di fascia alta della tecnologia di trasmissione.
La direzione della specializzazione è scegliere uno o più marchi in base alle risorse esistenti e alla comprensione dei mercati circostanti. Questa è la specializzazione. Perché dovremmo specializzarci? Dobbiamo concentrare tutte le nostre risorse, tecniche, personale, capitali, efficienza e così via. Dobbiamo concentrare i nostri sforzi su un unico luogo e il mercato futuro sarà solo sempre più dettagliato. Perché nel mercato circostante? Con la rapida diffusione del personale di manutenzione, ci sarà sempre più scelta per i fornitori. Si stima che il principio di prossimità sia uno standard di selezione per molti addetti agli acquisti. Se vuoi migliorare il servizio aggiuntivo di manutenzione, più è vicino, meglio è. La manutenzione delle apparecchiature di controllo industriale generale può essere una tendenza. Solo pochi di loro possono attrarre affari a livello nazionale, quindi la specializzazione è OK I professionisti del settore devono pensarci.
Affidabilità, alta efficienza e tasso di riparazione zero sono i requisiti di base della manutenzione dei servoazionamenti. Ora una rilavorazione nel mercato può portare alla perdita di questo cliente. Nessuno è disposto ad accettare un prodotto di riparazione sconosciuto buono o cattivo e portarlo sulla propria macchina per testare il risultato. Cosa c'è di più in GG, il mercato è pieno di piattaforme di test. Non importa quanto sia profondo il Kung Fu, il trasferitore non è sicuro del servo con il motore.
Errore: quando l'oscilloscopio controlla l'uscita di monitoraggio della corrente del driver, si scopre che è tutto rumore e non può essere letto.
Professionalizzazione, lo scopo di costruire una piattaforma non è altro che ottenere un servizio di manutenzione rapido ed efficiente dei servoazionamenti. In passato, forse questi due tipi di servizi andavano bene, ma ora non sono sufficienti. Dobbiamo preparare un inventario sufficiente. Una misura importante dell'efficienza deve essere veloce, tre ore, due ore, un'ora ... Più veloce e più veloce? Naturalmente, è il modo più veloce ed efficiente per cambiare schede e accessori. Il prezzo sta peggiorando. Tuttavia, il servizio dovrebbe essere sempre al passo con il mercato. Al momento, può solo tenere il passo con il mercato. Nella manutenzione di questi servoazionamenti universali, può essere eseguita solo in volume. Il funzionamento della linea di assemblaggio, la manutenzione di massa e l'inventario sono la garanzia.
Causa del guasto: l'uscita di monitoraggio della corrente non è isolata dall'alimentazione CA (trasformatore)
Metodo di trattamento: il voltmetro CC può essere utilizzato per rilevare e osservare.
Guasto: il motore gira più velocemente in una direzione che nell'altra
1. Causa del guasto: la fase del motore brushless è sbagliata. Metodo di elaborazione: rilevare o scoprire la fase corretta.
2. Motivo del guasto: quando non viene utilizzato per il test, l'interruttore di test / deviazione si trova nella posizione di test. Metodo di trattamento: ruotare l'interruttore di test / deviazione nella posizione di deviazione.
3. Motivo dell'errore: la posizione del potenziometro di deviazione non è corretta.
Metodo di elaborazione: reset.
Guasto: motore in stallo
1. Motivo dell'errore: la polarità del feedback di velocità è errata.
Metodo di trattamento:
un. Se possibile, ruotare l'interruttore della polarità del feedback di posizione in un'altra posizione. (su alcune unità)
b. Se viene utilizzato un contagiri, cambia il contagiri + e il contagiri sul driver.
c. Se si utilizza l'encoder, collegare enc A e enc B sul driver.
d. Ad esempio, nella modalità velocità Hall, commuta hall-1 e hall-3 sul driver, quindi collega motor-a e motor-b.
2. Motivo del guasto: quando la retroazione della velocità dell'encoder, l'alimentazione dell'encoder perde potenza.
Controllo connessione encoder 5V. Assicurarsi che l'alimentatore possa fornire corrente sufficiente. Se si utilizza un alimentatore esterno, assicurarsi che la tensione sia segnalata al driver.
Guasto: il LED è verde, ma il motore non si muove'
Motivo del guasto: è vietato agire al motore in una o più direzioni.
Metodo di elaborazione: controlla le porte di inibizione e - inibizione +.
2. Motivo del guasto: il segnale di comando non è alla massa del segnale del conducente.
Metodo di elaborazione: collegare la massa del segnale di comando con la massa del segnale del driver.
Guasto: dopo l'accensione, il LED del driver non è acceso Motivo del guasto: la tensione di alimentazione è troppo bassa, inferiore alla tensione minima richiesta.
Trattamento: controllare e aumentare la tensione di alimentazione.
Guasto: quando il motore gira, la spia LED lampeggia
1. Motivo del guasto: errore di fase Hall.
Trattamento: controllare se l'interruttore di impostazione della fase del motore (60? / 120?) È corretto. La maggior parte dei motori brushless ha un 120? Differenza di fase.
2. Causa del guasto: guasto del sensore Hall
Metodo di trattamento: rilevare la tensione della sala a, sala B e sala C quando il motore ruota. La tensione dovrebbe essere compresa tra 5 V CC e 0.
Guasto: il LED rimane sempre rosso
Causa del guasto: c'è un guasto.
Metodo di trattamento: causa: sovratensione, sottotensione, cortocircuito, surriscaldamento, driver vietato, sala non valida.
Nell'uso del servosistema, può essere utilizzato servo-on come segnale per controllare il motore fuori linea in modo da ruotare direttamente l'albero motore?
Sebbene il motore possa essere offline (in stato libero) quando il segnale srv-on è scollegato, non utilizzarlo per avviare o arrestare il motore. Un uso frequente può danneggiare l'unità. Se è necessario realizzare la funzione off-line, è possibile adottare l'interruttore della modalità di controllo: supponendo che il servosistema necessiti del controllo della posizione, il parametro di selezione della modalità di controllo no02 può essere impostato a 4, ovvero la prima modalità è il controllo della posizione e la seconda modalità è il controllo della coppia. Quindi la modalità C viene utilizzata per cambiare la modalità di controllo: nel controllo della posizione, il segnale della modalità C viene aperta per far lavorare il conducente nella prima modalità (cioè controllo della posizione); quando è necessario essere offline, il segnale C-mode viene chiuso per far lavorare il driver nella seconda modalità (cioè controllo di coppia). Poiché l'ingresso del comando di coppia trqr non è collegato, la coppia di uscita del motore è zero, realizzando così offline.
Etichetta sexy: servoazionamento CA, Cina, produttori, fornitori, commercio all'ingrosso, personalizzato, alta qualità
Invia la tua richiesta